
Abstract
Standardized tree risk assessment protocols are beneficial to utility vegetation management (UVM) in that they provide the most consistent qualitative assessment of a tree’s likelihood of failure, likelihood of impact, and overall risk. Yet, utility foresters do not often inspect off-right-of-way (ROW) vegetation due to constraints such as accessibility and time, which leaves many off-ROW trees unmonitored or with limited monitoring. This review focuses on the key studies addressing the application of unmanned aerial systems (UAS)-based LIDAR systems, especially in terms of UVM along electrical distribution systems. We reviewed the scientific literature in terms of the acquisition of UAS-based LIDAR data and the processing of the data. The incorporation of UAS-based LIDAR will allow utility foresters to better manage both on- and off-ROW trees to better identify tree risks and thus reduce outages and increase resiliency of distribution power lines.
Introduction
Utility vegetation management (UVM) along electrical rights-of-way (ROWs) is the single largest maintenance cost faced by many electric utilities, with costs of $2 to $10 billion annually in the United States alone (Guggenmoos 2003, 2010). In the aftermath of the Northeast blackout of 2003, in which a lack of vegetation management played a key role, the Energy Policy Act of 2005 allowed the Federal Energy Regulatory Commission (FERC) to enact the North American Electric Reliability Corporation (NERC) policies and guidelines for electric systems operations as federal regulatory standards. Most notably, Standard FAC-003-4 (NERC 2020), titled “Transmission Vegetation Management,” requires a transmission vegetation management program (TVMP) which designates a plan to maintain safe and reliable electric power through the management of vegetation on and adjacent to electrical transmission ROWs. While unplanned outages are and continue to be more common along electrical distribution systems, NERC FAC-003-4 does not apply to distribution-level UVM. Even so, most electric utility companies have some sort of UVM plan for their distribution system. Yet, due to variance in reporting methods between states, the reports are often not comparable. While the reports do not utilize the same reporting methods or terminology, many electric utilities cite “tree caused/related” or “vegetation caused/related” as their most common type of unplanned interruption (Guggenmoos 2003, 2010, 2011). Of these tree- or vegetation-related disruptions on the distribution system, most are attributed to “fall ins,” trees outside the ROW which were tall enough to fall into the ROW and across or through the electrical conductor (Guggenmoos 2003, 2007, 2011; NERC 2020). Furthermore, most unplanned disruptions occur on the distribution system, with vegetation-related outages generally regarded as the leading cause (Guggenmoos 2003, 2010; Ituen et al. 2008). Two major factors likely contribute to vegetation-related outages: the lack of easement authority and/or the offending vegetation is located outside the ROW and therefore is not managed by the utility (Miller et al. 2015). These unplanned outages have a direct effect on electrical reliability and grid stability, as well as the US economy. An Electric Power Research Institute (EPRI) study estimated that US business sectors lost between $104 to $164 billion in 2001 due to power outages in either the transmission or distribution grid (Lineweber and McNulty 2001).
Other challenges of managing the ROWs around utility infrastructure include: the sheer scope of the current electrical grid in the United States, issues of comparability stemming from non-standardized reporting methods across states and utilities, state versus federal regulations based on voltage, and state to state variability in state-level regulations. To demonstrate, the North American Electric Transmission System consists of all electrical lines carrying 35 kV and higher, stretches approximately 476,398 linear miles (766,688 km), and requires the management of an estimated 8.6 million to 11 million acres (3.5 million to 4.5 million ha)(Miller et al. 2015; Warwick et al. 2016), while the associated electrical distribution system is comprised of approximately 6,332,236 linear miles (10,190,746 km) of lines carrying less than 35 kV (Warwick et al. 2016). Thus, if the distribution is patrolled on a 5-year cycle, each year would require over 1 million miles (1.6 million km) of line to be patrolled annually.
The goal of UVM is to provide safe and reliable electrical power, and multiple specialized personnel play integral roles in the maintenance and monitoring of vegetation conditions. Utility foresters manage on a larger scale, usually associated with a service area, region, or across an entire utility. Meanwhile, utility arborists are tasked with monitoring vegetation conditions on the ROW, as well as monitoring and auditing line clearance contractors. Line clearance contractors are the largest segment of the UVM industry and fill numerous, varied roles, including qualified line clearance arborists, heavy machine operators, and groundmen.
Standardized tree risk assessment protocols are beneficial to UVM in that they provide the most consistent qualitative assessment of a tree’s likelihood of failure, likelihood of impact, and overall risk (Smiley et al. 2017; Goodfellow 2020). Yet, due to constraints such as accessibility and time, utility foresters and arborists do not often inspect off-ROW vegetation, leaving many off-ROW trees unmonitored or with limited monitoring (Goodfellow 2020). While shortening pruning cycles, and therefore decreasing the time frame of the risk assessment, has been found to both decrease the number of interruptions and decrease the time and cost to prune individual trees, the use of additional vegetation management resources across a utility’s grid can be costly and result in excessive pruning, exacerbating poor tree health along a utility’s ROWs (Kuntz et al. 2001, 2002; Radmer et al. 2002; Guikema et al. 2006; Miller et al. 2015; Goodfellow 2020). Furthermore, foot patrol for visual inspection of electrical distribution corridors often relies upon an individual forester’s subjective interpretation of vegetation conditions and as such may not be accurate or comparable between different individual utility foresters or arborists (Ferguson et al. 2012; Koeser and Smiley 2017).
From 2001 forward, the American Society of Civil Engineers (ASCE) has released an Infrastructure Report Card every 4 years which details the current infrastructure conditions and needs within the US. For the 2017 report, the USA received a score of “D+” under the “Energy” category due to aging infrastructure and a lack of resilience in the face of severe weather events. A list of recommendations provided by the ASCE included, “Promote usage of remote sensing and inspection technologies to lower the cost of energy system monitoring; focus operation and maintenance spending on highest-risk system components” (ASCE 2017).
Targeted prescriptive management of individual trees and problematic areas may be prioritized due to the rapid and accurate identification of vegetation threats (Miller et al. 2015). Most electric utility companies already use some form of geographic information system (GIS) to map their electrical transmission and distribution systems. In the past decade, some utilities have augmented their GIS through the integration of airborne LIDAR data as a tool to verify compliance of the United States’ transmission system with federal regulations. These LIDAR systems have generally been mounted on small aircraft, such as helicopters and airplanes, and have relatively high costs of operation (Chen et al. 2018). Yet the advent of affordable unmanned aerial systems (UAS), colloquially called drones (Figure 1), and the falling costs of LIDAR technology have facilitated the potential regulation, mapping, and modelling of the electrical distribution system, which could very well be the next step in developing a more reliable grid.

Unmanned aerial system used for collection of LIDAR data.
While these technologies may allow for more precise and cost-efficient UVM approaches, at the moment there is a research gap specific to the application of UAS-based LIDAR for distribution-level UVM. Despite this, there are growing related fields of research in UAS-based LIDAR for forest inventories (Jaakkola et al. 2010; Wallace et al. 2012; Wallace et al. 2014; Wallace et al. 2016; Staley 2022) and airborne LIDAR for electrical transmission-level system monitoring (Ituen et al. 2008; Ko et al. 2012; Kim and Sohn 2013; Chen et al. 2018; Siranec et al. 2021; Mongus et al. 2021). Walker and Dahle (2022) noted that the application of remote sensing and UAS technology could advance the UVM industry in terms of managing tree risk, especially for off-ROW trees. Utilizing UAS and LIDAR in tandem may allow for the rapid identification of trees with elevated risks that are growing both in and alongside the distribution ROWs. Furthermore, LIDAR data has the advantage of being able to be stored and reviewed or utilized again at a later date (Ferguson et al. 2012). This will allow for GIS-based change detection methodologies to be used between scans and could be used to audit tree removal, calculate vegetation growth rates, and monitor natural tree failure in the utility forest. The latter, monitoring tree failure in the utility forest, would be useful for further refinement of predictive individual tree failure models and UVM risk-management tools.
This review focuses on the key studies addressing the application of UAS-based LIDAR systems, especially in terms of UVM of the electrical distribution system. We review the scientific literature in terms of the acquisition of UAS-based LIDAR data and the processing of the data.
Remote Sensing Data Acquisition
Remote sensing methods of utility ROW corridors can be grouped into 2 major methodologies: 2D image-based approaches and 3D points-based approaches (Chen et al. 2018). This review will focus on UAS- and/or LIDAR-related literature, though we will make brief mention of some of the other technologies which have been utilized for ROW management. For a more holistic and detailed review of remote sensing technologies applied to power-line corridors, see Matikainen et al. (2016).
Two-dimensional image-based methods include optical images from satellite (Ahmad et al. 2011; Ahmad et al. 2013), aerial (Frank et al. 2010; Mills et al. 2010), and UAS (Pastucha et al. 2020) platforms, and multispectral imagery from satellite (Ahmad et al. 2011; Ahmad et al. 2013) and aerial (Mills et al. 2010) platforms. Yet each method possesses significant drawbacks or challenges (Pastucha et al. 2020). Satellite imagery does not generally possess a sufficient resolution to provide the necessary specific information on terrain and vegetation in or near the utility ROW (Pastucha et al. 2020). Aerial imagery techniques require manual stereo measurements (Mills et al. 2010; Pastucha et al. 2020). While UAS image-based approaches hold promise, drawbacks related to optical imaging and radiometric normalization are hurdles that will need to be overcome (Pastucha et al. 2020). Thus, aerial LIDAR systems have become popular in studies of remote sensing of powerline corridors (Pastucha et al. 2020).
In 1971, the National Aeronautics and Space Administration (NASA) demonstrated the use of LIDAR technology to map a portion of the moon surface, and shortly thereafter a number of similar systems were adapted for use on Earth. Primarily spurred on by the need for digital elevation models (DEMs) in forested areas and the technology’s ability to estimate tree heights, counts, and even delineate tree crowns, interest in LIDAR technology began to blossom (Carson et al. 2004; Naesset 2009). Carson et al.’s (2004) paper at the 2004 American Society for Photogrammetry and Remote Sensing (ASPRS) Annual Conference, titled “LIDAR Applications in Forestry—An Overview,” reviewed the applications of LIDAR to forestry up to that point (Carson et al. 2004). In those early years of LIDAR applications in forestry, major limitations were unstandardized data collection practices, limited computer processing power, and lack of accurate modelling procedures.
Tiede et al. (2005) developed an early GIS-based workflow for forest inventory through individual tree crown detection and segmentation from LIDAR data. Tree detection rates were deemed poor, with only 72% of dominant trees being detected and only a 51% overall tree detection rate (Tiede et al. 2005). By 2008, the literature had begun exploring both LIDAR and UAS as tools to improve the management of power lines and the associated vegetation (Ituen et al. 2008). A case study conducted by Ituen et al. (2008) developed a workflow for analyzing electrical lines for risk management purposes. The study suggested that the electrical reliability provided by visual aerial inspection of vegetation along power lines would be surpassed with use of a combination of LIDAR and geo-referenced imagery (Ituen et al. 2008). Further-more, the researchers suggested that plant health data may be available in the form of normalized difference vegetation index (NDVI) from spectral analysis of imagery (Ituen et al. 2008). Lastly, the study found that aerial LIDAR inspection far outpaced traditional visual inspection, completing 50 km per day of scanning, an equivalent to 4 days of traditional visual inspection (Ituen et al. 2008).
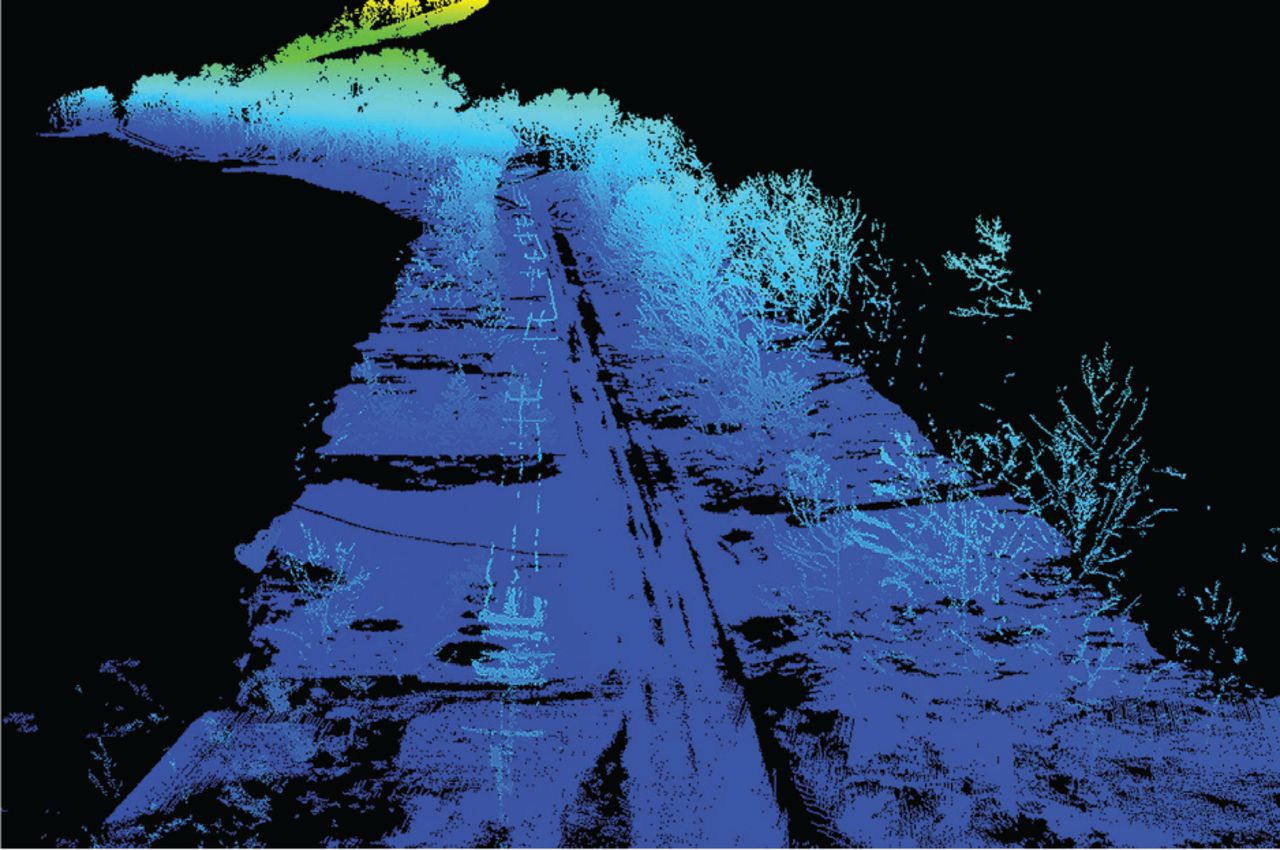
Mills et al. (2010) compared LIDAR and photogrammetric techniques for vegetation management of electrical ROWs, focusing on the ability to identify the height and position of vegetation relative to the power line. LIDAR outperformed photogrammetry in absolute and relative position of vegetation, including both cross track and along track position, and tree height estimation (Mills et al. 2010). The authors concluded that LIDAR is roughly 3 times more accurate than photogrammetry (Mills et al. 2010). Through this study, Mills et al. (2010) clearly demonstrate the accuracy and potential of aerial LIDAR technology as applied to UVM (Walker 2020)(Figure 2).
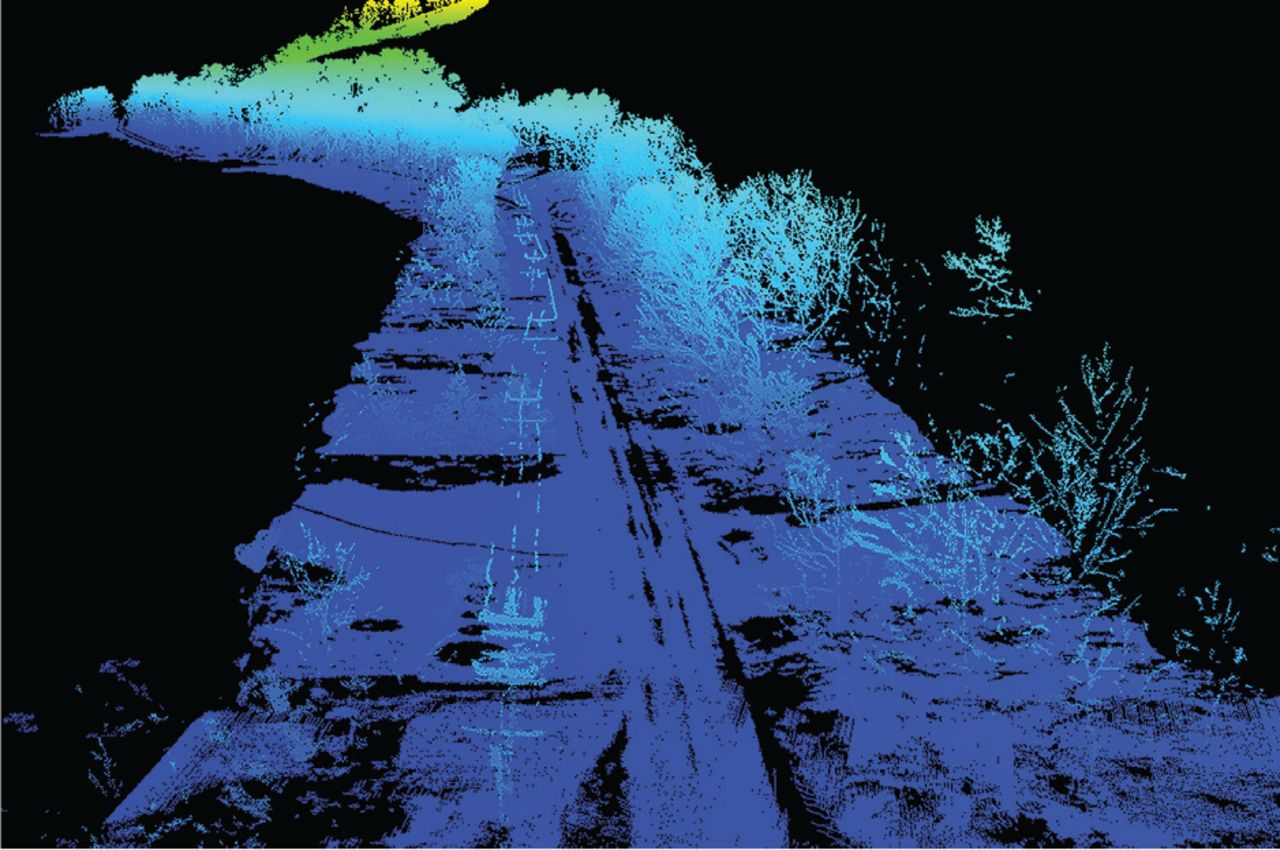
LIDAR point cloud with trees, distribution line, and ground level.
Frank et al. (2010) demonstrated the capability of high-resolution hyperspectral imagery and LIDAR used in combination for the mapping of electrical transmission lines, calculation of tree height and conductor clearance, and discrimination of tree species. The study utilized LIDAR mounted on a small fixedwing aircraft, which generated a point cloud of approximately 28 points per m2 (ppm2)(Frank et al. 2010). The LIDAR was found to be accurate to within 5 cm (x, y) and 4 cm (z, height)(Frank et al. 2010). The study then calculated line clearances between vegetation and conductor and categorized vegetation according to NERC FAC-003-4 minimum vegetation clearance distances (MVCD)(Frank et al. 2010). Classification of tree species was found to be best with a merged hyperspectral and LIDAR data set using a support vector machine (SVM) and resulted in a tree species identification accuracy of 92% (Frank et al. 2010).
In 2011, a team of researchers from Optech Inc. studied the advantages of aerial LIDAR for electrical line management and included both engineering and vegetation management advantages (Ussyshkin and Theriault 2011). The team’s analysis of vegetation included a “vegetation encroachment analysis” and a “tree proximity analysis” (Ussyshkin and Theriault 2011). The former demonstrated LIDAR’s capability to identify and quantify necessary UVM workload, and the latter demonstrated LIDAR’s ability to accurately identify trees that pose a risk to electrical lines due to height and location (Ussyshkin and Theriault 2011).
The following year, Ko et al. (2012) published a case study on the mapping of tree genera using aerial discrete return LIDAR. They predicted tree species from geometric properties of the trees in the LIDAR point cloud (Ko et al. 2012). While the primary purpose of the study was the identification of tree genera, the study also mapped an electrical transmission ROW, identified trees with potential to cause an electrical outage, identified direction of tree lean for trees with sufficient height to fall across electrical lines (Figure 3), and located vegetation infringing upon MVCD, as established by NERC FAC-003-4 (Ko et al. 2012). In addition, at the 9th International Symposium of Environmental Concerns in Rights-of-Way Management, Ferguson et al. (2012) outlined how aerial LIDAR could be utilized for vegetation hazard detection as a method for compliance to NERC FAC-003-4 while mitigating unintentional environmental impact that may occur during conventional UVM. The authors cite LIDAR’s ability to provide time-stamped, auditable, and objective data as the technology’s core strength (Ferguson et al. 2012).

An example of using tree height to estimate risk of a tree impacting a distribution line if it were to fail. Adapted from Walker 2020.
While LIDAR literature relevant to UVM has been progressing for nearly 2 decades, pertinent UAS literature has only existed for about half that amount of time. Jaakkola et al. (2010) developed a low-cost UAS-based LIDAR system and tested the feasibility of obtaining accurate tree measurements with the system. The system was the first of its kind in the literature, and the study demonstrated its ability to obtain a high-density point cloud for making tree measurements. Field measurements in this study found that the standard deviation of tree heights was 30 cm (Jaakkola et al. 2010). The standard deviation of tree heights according to the UAS-LIDAR obtained point cloud was 34 cm (Jaakkola et al. 2010). This publication also provided a glimpse of the change detection capability of such a system through the successful estimation of biomass change pre- and post-thinning of a scanned stand of Scots pine (Pinus sylvestris) (Jaakkola et al. 2010).
Wallace et al. (2012) also developed a low-cost UAS-LIDAR system. Their system was intended for forest inventory, and the authors developed a work-flow to utilize the new technology, allowing for very high-density point cloud data to be acquired (Wallace et al. 2012). In this initial study, the system was flown at 50 m above ground level (AGL) and was able to acquire a maximum point cloud density of 63 ppm2 (Wallace et al. 2012). Due to the increased point cloud density, decreases in standard deviation of key measurements including tree height, tree location, and crown width were observed (Wallace et al. 2012).
In a subsequent study, Wallace et al. (2014) utilized the UAS-LIDAR system to again obtain high-resolution LIDAR data, this time for comparing multiple tree detection and delineation algorithms. While the study was primarily seeking to determine the best algorithm by which to detect and delineate trees from within a LIDAR point cloud, it also assessed the accuracy of each of the algorithms at different point densities and examined the practicality of UAVs as a platform for aerial LIDAR (Wallace et al. 2014). When using fulldensity LIDAR point clouds, all algorithms detected 90% of trees, and thus the authors concluded that trees within a 4-year-old Eucalyptus plantation can be accurately detected and delineated using UAS-based high-density LIDAR (Wallace et al. 2014). The researchers found that point density was more significant than the algorithm used, which was contrary to previous studies on tree detection and delineation from LIDAR data (Wallace et al. 2014). Due to the more accurate description of tree crowns in high-density LIDAR data, the algorithms’ measurements of tree crowns more closely matched field measurements, and tree locations were more accurate (Wallace et al. 2014).
In an additional follow-up study conducted, Wallace et al. (2016) provided a succinct comparison of 2 UAS-based airborne remote sensing technologies: LIDAR and SfM (structure from motion). Both technologies generate point clouds which can be manipulated to provide information about forest structure, including tree heights, canopy dimensions, biomass, and stem counts. The data acquisition and processing workflows and forest structure measurement accuracy were assessed for both technologies (Wallace et al. 2016). Point clouds derived from each technology were georeferenced and exported to LAS format, and ground points were identified, in both point clouds, and interpolated into a DEM of 10-cm resolution (Wallace et al. 2016).
Each respective DEM was used for the computation of forest structure metrics: horizontal canopy structure, vertical canopy structure, stem height, stem location, and stem crown area (Wallace et al. 2016). The SfM point cloud had 5,652 ppm2 and required 24 hours of processing time, compared to the LIDAR point cloud which had 174 ppm2 and required 1.5 hours of processing time (Wallace et al. 2016). The 2 DEMs had almost the same horizontal and vertical accuracy, with a mean difference of 0.09 m, resulting in similar representations of the terrain (Wallace et al. 2016). SfM was less accurate at mapping the terrain under canopy coverage compared to LIDAR, due to LIDAR’s ability to penetrate the canopy and record multiple returns (Wallace et al. 2016). However, SfM generally failed to provide returns from the middle canopy (Wallace et al. 2016). Of the 136 measured trees on the plot, LIDAR identified 122, and SfM identified 112 (Wallace et al. 2016). The authors concluded that both technologies are viable remote sensing tools for 3D imaging of forest structure (Wallace et al. 2016).
More recently, several researchers have explored the potential of UAS-LIDAR systems for electrical transmission ROW management (Chen et al. 2018; Siranec et al. 2021). Chen et al. (2018) developed an automatic clearance anomaly detection tool for transmission-level electrical corridors from UAS-LIDAR data. The authors’ tool used UAS-LIDAR point clouds as the input and through a series of operations was able to provide terrain information as a DEM as well as extract transmission pylons and model power lines (Chen et al. 2018). The results of these operations were then used to calculate clearance anomalies (Chen et al. 2018). Chen et al. (2018) were able to identify not only tree encroachment anomalies, but also other anomalies such as a lack of clearance between 2 crossing power lines. More impressive was the authors’ accuracy in calculation of clearances. The study noted that the average error of clearance calculations was 0.08 m and that the most extreme error was 0.14 m (Chen et al. 2018).
Siranec et al. (2021) detailed the application and potential limits of point cloud data when applied to power line scenes. While this publication details many of the potentials of UAS-LIDAR for imaging utility ROW corridors, the focus is primarily on topics related to the construction and maintenance of grid components, such as determination of conductor position, ability to use conductor position from LIDAR and climatic variables to calculate conductor position under different climatic conditions, determination and prediction of conductor elongation due to metallurgical creep, and monitoring of tower inclination and deflection (Siranec et al. 2021).
While both UAS and LIDAR have benefited from increasing popularity in the literature, the technologies are not without their drawbacks and limitations. UAS are affected to a greater degree than manned aerial systems by wind (Chen et al. 2018; Siranec et al. 2021). Wind can cause issues for conductor extraction and modelling due to conductor sway and deflection (Chen et al. 2018; Siranec et al. 2021). Likewise, Chen et al. (2018) mention that wind can cause deflection and deviation of tree crowns during LIDAR data acquisition, resulting in uncertainty of true tree crown position. Thus, for safety and data accuracy, data acquisition is limited to calm weather conditions (Chen et al. 2018). Current Federal Aviation Administration (FAA) regulations in the United States further limit UAS systems to line-of-sight operation. Yet, the FAA does allow commercial UAS pilots to apply for a waiver to fly beyond visual line-of-sight. Chen et al. (2018) note that with further technological development and continued refinement of regulations, further efficiencies will be gained.
Another concern when utilizing UAS for aerial survey of power-line corridors includes the selection of UAS platform, either fixed-wing or multi-rotor (Pastucha et al. 2020). Fixed-wing systems are more efficient and provide greater flight ranges (Pastucha et al. 2020). Yet these systems are more constrained by the current regulatory environment (at least in the US) since UAS in the United States are limited to visual line-of-sight. In contrast, multi-rotor systems are more flexible, with the ability to hover, and can be used for precise surveys at low altitudes (Pastucha et al. 2020).
LIDAR, like UAS, possesses limitations related to weather conditions (Chen et al. 2018; Siranec et al. 2021). As previously noted, trees and conductors may deflect in windy conditions, providing inaccurate information of conductor and tree locations (Chen et al. 2018; Siranec et al. 2021). Additionally, Pastucha et al. (2020) note that the costs of equipment, surveying, and processing can be prohibitive to the adoption of UAS-LIDAR systems for UVM. Furthermore, point density and the tradeoff between accuracy of treetops and the efficiency of ROW inspection is an issue that will need to be solved (Chen et al. 2018). Chen et al. (2018) conclude that forest inventory methods, such as those presented in the series of publications by Wallace et al. (2012, 2014, 2016), are fundamentally different than ROW inspection in that ROWs are long, large areas that are not conducive to very low altitude flight, and that repetitive, overlapping, high-density scans are not efficient and may endanger grid components.
Regardless, LIDAR has quickly become one of the premier aerial data types, as it can provide unprecedented detail and accuracy (Staley 2022). UAS-based LIDAR has the advantage of being flown closer to the ground compared to traditional aerial platforms, allowing for more returns per unit area, which allows for the creation of very high-resolution point cloud data sets (Wallace et al. 2012). While these data sets require major data processing resources, the information obtained from them can be particularly useful. Given that aerial LIDAR from larger, manned aircraft has been used to map and monitor electrical transmission ROW vegetation and line sag conditions, and that UAS-based LIDAR has been utilized for forest inventories, the application of UAS-based LIDAR to mapping and monitoring the electrical distribution grid appears to be a natural fit (Frank et al. 2010; Ussyshkin and Theriault 2011; Wallace et al. 2012; Kim and Sohn 2013).
Data Processing
Over the past 2 decades, the body of literature on remote sensing of utility ROWs has developed rapidly, expanding to encompass multiple fronts, including power line extraction and 3D reconstruction, and the related fields of vegetation detection and forest inventory (Chen et al. 2018; Siranec et al. 2021). Many early studies involving LIDAR and utility ROWs were focused on the extraction and 3D reconstruction of power lines (Mongus et al. 2022). Studies of ROW clearance and vegetation encroachment have occurred less frequently but are present in the literature (Mongus et al. 2022). Lastly, forest inventory literature, while not quite as substantial as that of extraction and reconstruction of the corridor scene, is well represented (Jaakkola et al. 2010; Wallace et al. 2012; Wallace et al. 2014; Wallace et al. 2016).
A basic LIDAR workflow generally starts with classification of the point cloud, a process which labels each point in the point cloud as a certain object (i.e., ground, vegetation, conductor, power line pole, building, etc.). Then ground points are interpolated into a surface, which is referred to as a digital elevation model, or DEM. From here, different studies deviate and use combinations of the following steps: (1) extraction and modelling of grid components, including pylon or pole detection and power line catenary curve modelling; (2) individual tree crown detection and segmentation, where individual tree-tops are detected and their associated tree crowns are segmented, providing an identity to individual trees within the point cloud; (3) vegetation encroachment detection or the process of identifying locations where vegetation is within conductor clearance areas; (4) and the derivation of tree biophysical properties such as height, diameter at breast height (DBH), and species classification. The variety of combinations of these methods speaks to the information richness of LIDAR and UAS-LIDAR point clouds from the UVM perspective.
Point Cloud Classification
Classification of a LIDAR point cloud, where each return is given a label based on the surface that returned the pulse (vegetation, building, ground, etc.), is time-consuming and expensive, particularly if it is completed manually (Brunker 2016). Yet a higher level of detail in point cloud classification allows for more accurate individual tree detection and segmentation and tree-to-conductor proximity analysis (Brunker 2016). Due to the volume of data necessary to manage electrical infrastructure with LIDAR, automated classification of electrical ROW scenes is necessary for effective management (Kim and Sohn 2013).
Decision-making trees are effective tools to use computer algorithms for supervised machine learning, and random forests, a supervised learning classifier, have been shown to provide good results (Michałowska and Rapiński 2021). To this end, Kim and Sohn (2013) explored the potential of using random forests to classify 5 key objects (vegetation, pylons, wire, buildings, and low objects) from aerialLIDAR point clouds acquired from a power-line corridor in Sacramento, CA. The researchers compared a grid-based classification scheme to a point-based classification scheme, then distinguished which of 21 features associated with each point were most useful in the classification (Kim and Sohn 2013).
Kim and Sohn’s results showed that random forests more accurately classified power-line corridor scenes after being trained with balanced training data (97.95%) compared to unbalanced training data which resulted in an accuracy of 96.62%. Of the 21 point features assessed for classification relevancy, 12 were ultimately selected (Kim and Sohn 2013). Using balanced training data and the 12 key classification point features, a sample-weighted accuracy of 91.04% and a class-weighted accuracy of 90.07% was achieved (Kim and Sohn 2013). The point-based classifier was more accurate than the grid-based classifier by 4.86% in sample-weighted accuracy and 5.74% in class-weighted accuracy (Kim and Sohn 2013). Despite the relative accuracy of their methods, research aiming to improve automated classification should continue, as approximately 90% classification accuracy across the entire electrical grid would result in many errors and hours of data cleanup (Kim and Sohn 2013).
Digital Elevation Model (DEM) Interpolation
Foresters were some of the first to suggest utilizing LIDAR for DEM creation due to its ability to penetrate vegetation cover (Carson et al. 2004). For early examples of LIDAR-derived DEM creation, see Carson et al. (2004) or Maclean and Krabill (1986). For an example of a more modern method of DEM generation, see Zhang et al. (2003). DEMs, and thus DEM interpolation, are extremely important to LIDAR-based UVM, as the DEM will provide the ground level for all height measurements, including both trees and electrical infrastructure (Walker 2020).
Individual Tree Crown Detection and Segmentation
Individual tree crown (ITC) detection and segmentation has long been a goal of remote sensing. In fact, many modern canopy height model (CHM)-based methods trace their roots back to methods developed for aerial imagery. For an overview of ITC detection and segmentation from aerial imagery, see Brandtberg et al. (2003). The ITC methods, which LIDAR and aerial imagery share, include local maxima (LM), region growing (RG), watershed (WS), valley-following (VF), scale-space theory (SS), template matching (TM), Markov random fields (MRFs), and marked point processes (MPP)(Larsen et al. 2011; Mohan et al. 2017).
In 2012, Li et al. argued that converting from point cloud to raster data type is not ideal for individual tree detection, since the interpolated raster surface, typically a CHM, has many potential sources of error. Li et al. (2012) utilized an individual tree detection and segmentation algorithm which detects and segments trees directly from the point cloud.
More recently, Hamraz et al. (2016) demonstrated a robust method for tree segmentation directly from the point cloud for deciduous forests. The non-parametric approach identified 94% of dominant and co-dominant trees and obtained a false detection rate of 13%; overall accuracy was 77% (Hamraz et al. 2016). The approach works through an iterative process of global maximum identification, generation of vertical profiles radiating from global maximum, identification of the last point before “between-tree gap,” and/or the local minimum from each vertical profile. Then a convex hull is created from points identified in the previous step, and all points within the delineated convex hull boundary are segmented into a unique tree crown (Hamraz et al. 2016). The process is then repeated on the remaining points in the point cloud (Hamraz et al. 2016).
Detection of Vegetation Encroachment
The detection of vegetation encroachment within conductor clearance areas or within the ROW corridor has long been a topic of interest in the LIDAR literature (Frank et al. 2010; Ferguson et al. 2012; Ko et al. 2012; Chen et al. 2018; Mongus et al. 2022) and even more generally as a topic within remote sensing of power-line corridors (Ahmad et al. 2011; Ahmad et al. 2013; Pastucha et al. 2020). This type of analysis is ideal for transmission-level vegetation risk assessment since electrical transmission ROWs are regulated under NERC FAC-003-4, which has clearly defined rules about vegetation within and surrounding electrical transmission corridors. Thus, identification and removal or pruning of the offending vegetation to maintain regulatory compliance is of paramount importance. In contrast, electrical distribution-level ROWs are not regulated under such measures, and as such, there are a greater variety and occurrence of situations which allow for the potential interaction between vegetation and electrical conductors. While research on detection of vegetation encroachment has been driven by NERC FAC-003-4 compliance verification, vegetation encroachment and risk assessment methods for electrical distribution-level corridors remain scarce in the literature.
Derivation of Tree Biophysical Properties
Once trees have been detected and segmented from the point cloud, biophysical information about the trees can then be inferred based upon the distribution of points assigned to that tree. Information of particular interest to UVM includes tree species and/or genera identification for estimated growth and failure rates, tree height and location, as well as line height and location to determine if the tree could come into contact with electrical lines. Tree species/genera identification from a LIDAR point cloud is well documented within the literature (Persson and Holmgren 2004; Korpela et al. 2007; Holmgren et al. 2008; Korpela et al. 2010; Ko et al. 2012).
Obtaining tree height from LIDAR data is also well documented in the literature. For examples of this process, see Persson and Holmgren (2004), Popescu and Wynne (2004), or Suárez et al. (2005). While determining tree height by itself is useful for identifying NERC FAC-003-4 vegetation threats, it is lacking a few critical pieces of information: the distance between the electrical conductor and the tree, the height of the conductor, and the difference in elevations between the tree and the conductor. Additionally, the ability to assess the direction of tree lean would aid in further refining tree risk assessment for tree-caused damage of utility lines.
Few studies have attempted to assess tree lean from aerial LIDAR data. Ko et al. (2012) used a vertically sliding voxel to identify the centroid of a given voxel, then connected the lowest centroid to the highest via a straight line, allowing for an assessment of estimated tree lean. Hamraz et al. (2016) used a similarly assessed tree-lean angle as an input for a position agreement test, where field surveyed tree bases were linked to LIDAR-obtained treetops. Furthermore, Siranec et al. (2021) provided an example of the use of UAS-LIDAR for the identification of utility pole deflection and inclinations. There is a possibility that Siranec et al.’s (2021) procedure could be used to identify tree lean as a deflection or inclination, although this was unexplored. The accuracy of tree lean approximations from LIDAR has not been evaluated in the literature.
Conclusion
Among the emerging remote sensing technologies, LIDAR and unmanned aerial systems (UAS) are particularly promising for distribution vegetation management, as they may provide a faster, more accurate, and ultimately more cost-effective method for inspection compared to traditional UVM, where inspection is done visually by foot patrol, potentially over rugged terrain (Chen et al. 2018). Due to this rapid and accurate identification of vegetation threats, individual trees and problematic areas may be targeted for more prescriptive management (Miller et al. 2015).
While Walker (2020) provided a conceptual basis for “fall in” detection and “fall in” detection risk management along electrical distribution corridors, there is a need for more research on the detection and risk management of “fall in” risks along electrical distribution-level ROWs. Other frontiers in the literature include the development of spatially informed outage prediction models such as those presented in Hartling et al. (2021) and Jain et al. (2021).
UAS have been combined with LIDAR to develop platforms for forest inventories (Jaakkola et al. 2010; Wallace et al. 2012; Wallace et al. 2014; Hamraz et al. 2016; Wallace et al. 2016) and detection of vegetation encroachment in the electrical transmission corridor environment (Chen et al. 2018). Given these separate but related research directions, the combined use of UAS and LIDAR for electrical distribution UVM seems to be a logical extension of the application of these new technologies.
Conflicts of Interest
The authors reported no conflicts of interest.
Arboriculture & Urban Forestry Quiz Questions
To complete this quiz, go to the ISA website, log into your MyISA account, and make your way to the page for Arboriculture & Urban Forestry CEU Quizzes (wwv.isa-arbor.com/store/ceuquizzes/113).
Add the quiz to your cart, proceed through checkout, and look for the content to appear on your personal dashboard under the header, “My Quizzes.” If you need a username and password, send us an e-mail (isa{at}isa-arbor.com).
A passing score for this quiz requires sixteen correct answers. Quiz results will display immediately upon quiz completion. CEU(s) are processed immediately. You may take the quiz as often as is necessary to pass.

Acknowledgments
We would like to thank Drs. Michael Strager, Timothy Warner, Aaron Maxwell, and Paul Kinder for assistance during the preparation of this literature review. Financial support was received in part from the following sources: National Institute of Food and Agriculture (NIFA) McIntire-Stennis Grant (WVA00819), Tree Research and Educational Endowment (TREE) Fund Utility Arborist Research Fund (UARF) Grant #19-UAA-01, West Virginia University (WVU) Energy Institute Obrien Energy Research Funds Grant, and the WVU West Virginia Agriculture and Forestry Experiment Station (scientific article #3440).
- © 2023 International Society of Arboriculture. All rights reserved.
LITERATURE CITED









{kind=link}
{kind=link}
{kind=link}
{kind=link}
Jump to section
Related Articles
Cited By...
- No citing articles found.